Die Absicherung automatisierter Fahrfunktionen
absicherung automatisierter fahrfunktionen
- 01.12.2022

Ursächlich für die Komplexität ist, dass Szenarien mit mehreren Verkehrsteilnehmern im realen Verkehr enorm umfangreich sein können und darüber hinaus nicht exakt reproduzierbar sind. Vergleichbare Testergebnisse können kaum erzielt werden. Die Identifizierung kritischer Szenarien, sogenannter "Corner Cases", stellt eine weitere Herausforderung dar. Da Corner Cases extrem selten im Straßenverkehr auftreten, kann zufälliges Testen in der realen Welt stets nur eine Stichprobe darstellen. Nicht zu vernachlässigen ist darüber hinaus das Risiko: Reale Tests bergen häufig eine Gefahr für Mensch und Material. Auch die Definition notwendiger Freigabekriterien für hochautomatisierte Fahrfunktionen ist kein einfaches Unterfangen.
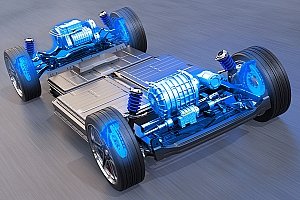
Virtuelle Absicherung automatisierter Fahrfunktionen
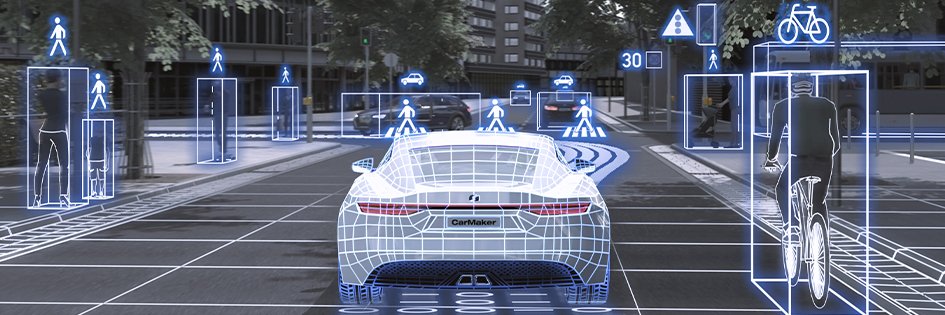
Eine Simulationsplattform wie CarMaker von IPG Automotive bietet im virtuellen Fahrversuch die Möglichkeit, die Software-Stacks automatisierter Fahrzeuge – also den Software-Anteil der Fahrfunktion – durch das sogenannte szenarienbasierte Testen in vielen kritischen Situationen zu testen und ihre funktionale Sicherheit zu gewährleisten. Als Methode des virtuellen Fahrversuchs kann das szenarienbasierte Testen maßgeblich zur Absicherung automatisierter Fahrfunktionen beitragen. Sie sorgt für eine starke Reduzierung des Testaufwands: Es werden hauptsächlich die für die Fahrfunktion relevanten Szenarien untersucht, anstatt eine bestimmte Anzahl benötigter Testkilometer festzulegen. Da die meisten Szenarien heute simuliert werden können, verbleiben nur noch wenige Tests, die zwingend auf dem Prüfgelände beziehungsweise im Feld durchgeführt werden müssen. Diese verbleibenden realen Fahrversuche dienen vor allem zur Validierung von Simulationsergebnissen. Dabei wird stets eine Durchgängigkeit von der Simulation bis zu den Prüfgelände- und Feldtests gewährleistet.Umgebungserfassung durch Sensoren

Zu beachten ist dabei ebenfalls, dass die Wahrnehmung der Umwelt durch Sensoren keineswegs perfekt ist, sondern einer Reihe möglicher Störungen unterliegt, die in der Simulation berücksichtigt werden müssen. Neben offensichtlichen Störeinflüssen wie Regen oder Nebel muss die Eigenlokalisierung des Fahrzeugs, wie beispielsweise die reduzierte Genauigkeit von GPS-Sensoren in Häuserschluchten, ausgleichen können. Bei Kameras hingegen kommen Linsenreflexionen hinzu, während Radarsensoren unterschiedliche Radarquerschnitte der detektierten Objekte korrekt verarbeiten müssen.
Realistische Abbildung von Sensoren